产品分类 / Product Categories
联系我们 / Contact Us
江西丹巴赫机器人股份有限公司服务热线:400-697-1188
联系电话:0791-88133135
公司传真:0791-88221576
手机号码:18607918385
公司邮箱:sale@danbahe.cn
公司地址:南昌市高新区创新三路811号
机器人是如何工作的?
DANBACH ROBOT
英语里“机器人”(Robot)这个术语来自于捷克语单词robota,通常译作“强制劳动者”。用它来描述大多数机器人是十分贴切的。上的机器人大多用来从事繁重的重复性制造工作。它们负责那些对人类来说非常困难、危险或枯燥的任务。
较常见的制造类机器人是机器臂。部典型的机器臂由七个金属部件构成,它们是用六个关节接起来的。计算机将旋转与每个关节分别相连的步进式马达,以便控制机器人(某些大型机器臂使用液压或气动系统)。与普通马达不同,步进式马达会以增量方式移动。这使计算机可以地移动机器臂,使机器臂不断重复完全相同的动作。机器人利用运动传感器来确保自己完全按正确的量移动。
这种带有六个关节的工业机器人与人类的手臂为相似,它具有相当于肩膀、肘部和腕部的部位。它的“肩膀”通常安装在个固定的基座结构(而不是移动的身体)上。这种类型的机器人有六个自由度,也就是说,它能向六个不同的方向转动。与之相比,人的手臂有七个自由度。
机器人的工作原理 放大图片
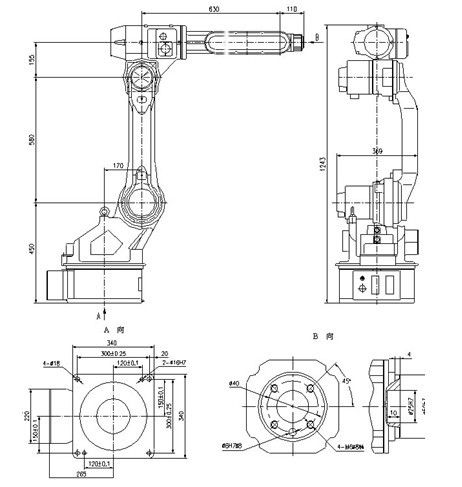
个六轴工业机器人的关节
人类手臂的作用是将手移动到不同的位置。类似地,机器臂的作用则是移动末端执行器。您可以在机器臂上安装适用于特定应用场景的各种末端执行器。有种常见的末端执行器能抓握并移动不同的物品,它是人手的简化版本。机器手往往有内置的压力传感器,用来将机器人抓握某特定物体时的力度告诉计算机。这使机器人手中的物体不致掉落或被挤破。其他末端执行器还包括喷灯、钻头和喷漆器。
工业机器人专门用来在受控环境下反复执行完全相同的工作。例如,某部机器人可能会负责给装配线上传送的花生酱罐子拧上盖子。为了教机器人如何做这项工作,程序员会用只手持控制器来引导机器臂完成整套动作。机器人将动作序列准确地存储在内存中,此后每当装配线上有新的罐子传送过来时,它就会反复地做这套动作。
上一篇:德国工业4.0与美国工业互联网
下一篇:不同种类机器人之间共性的