产品分类 / Product Categories
联系我们 / Contact Us
江西丹巴赫机器人股份有限公司服务热线:400-697-1188
联系电话:0791-88133135
公司传真:0791-88221576
手机号码:18607918385
公司邮箱:sale@danbahe.cn
公司地址:南昌市高新区创新三路811号
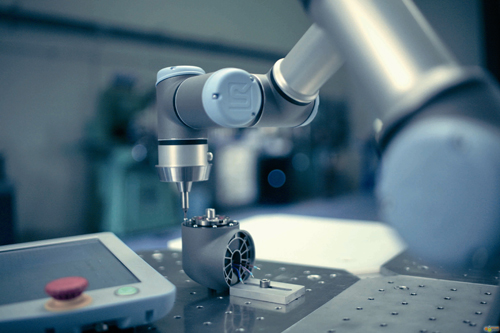
协作机器人与传统工业机器人的区别分析
DANBACH ROBOT
随着制造业的转型升,以及电子制造产业的发展,协作机器人成为热门话题,你以为协作机器人只是没有安全围栏的机器人吗?那就大错特错了,下面我们来消除误解吧~
协作机器人的定义是指被设计成可以在协作区域内与人直接进行交互的机器人,协作区域即为机器人和人类可以同时工作的区域。
协作机器人与传统工业机器人的主要差别有两点:
先是两种机器人所面向的目标市场不同,较初协作机器人的研发是为了提升中小企业的劳动力水平,降低成本,提高竞争力,就可以避免劳动力外包的情况(将工作机会留在较),因此协作机器人较初的市场就是中小企业,协作机器人的发展壮大也和中小企业分不开。
其次就是二者替代的对象不样。传统机器人代替生产线中的机器,机器人做为整个生产线中的组成部分,如果某个环节的机器人坏了,在没有设计备份的情况下,整个产线可能要停工。相比之下,协作机器人具有柔性特点,代替的是人,二者之间可以互换,整个生产流程灵活性很强。
协作机器人的优势得益于其四大属性:
安全监测站——这种操作模式要求机器人系统监控工作区域,当有人进入协同工作区域时,停止切动作。这种监测可能涉及使用激光监测是否有人跨越工作区边缘,切换到监测封闭空间是否打开了门,以及类似的东西。
手动示教——此类机器人不具备自主功能,需要工人操作员控制机器人的每个动作。运动的速度也受到监控,并保持在机器人内部系统的安全限值内。
速度和分离监测——机器人以这种方式监测和限制他们的运动速度,并监测协同工作区域里各个部件和工人的距离。机器人的运动必须保持在与工人的较小距离之外,或者当工人离得太近时,机器人将停止运动。
功率和力量限制——当此类机器人有运动速度和功率限制的设计,当它与工人或其他物体接触时,内置的传感器就能检测到。当类似接触发生时,速度和功率限制将使得碰撞能量不足以造成严重伤害。
协作机器人近些年火热的很大原因在于市场需求的转变。
从价格上来看,传统工业机器人的价格并不高,然而为了保证重复精度等,除了对机器人本身的设计要求之外还需要对机器人进行特定的配置和编程,这对于大多数终端用户来说很难实现,因此机器人自动化产线往往需要系统集成商根据用户现场的实际情况提供解决方案,这样条机器人自动化生产线的成本就大大提高了。而且机器人旦发生故障,会影响整个生产线的工作情况,由此产生更多费用。
如今,新兴行业产品特点逐渐向“小批量、多品种”转变,对于机器人的灵活性要求很高,协作机器人的柔性特点刚好可以应对这市场需求,无需根据产品的变化更换机器人,只通过简单编程就能迅速适应下个工作任务。协作机器人的易操作性更让毫无基础的工人就能完成新任务的编程,节约了人工和时间成本。
此外安全性也是十分重要的个原因。大多数传统的机器人出于安全性考虑都需要安装安全围栏进行隔离,以保证工人的安全。而安全围栏就使人与机器人的交互效率大打折扣,协作机器人的安全性刚好弥补这缺点,人与机器人可以并肩工作,更节约了场地成本。
虽然有诸多优势,然而协作机器人也有很明显的缺点,并不能够完全代替传统机器人。
为了确保安全性,协作机器人对力和碰撞能力进行了控制,因此导致运行速度比较慢,通常只有传统机器人的三分之到二分之;
为了减少机器人运动时的动能,协作机器人般重量比较轻,结构相对简单,这就造成整个机器人的刚性不足,定位精度相比传统机器人差1个数量;
低自重,低能量的要求,导致协作机器人体型都很小,负载般在10kg以下,工作范围只与人的手臂相当,很多场合无法使用。
相信未来协作机器人将逐渐变成个过渡的概念,随着技术的发展,未来所有的机器人都应该具备与人类起安全协同工作的特性。
上一篇:常见的工业机器人种类
下一篇:机器人智能的现状与未来