产品分类 / Product Categories
联系我们 / Contact Us
江西丹巴赫机器人股份有限公司服务热线:400-697-1188
联系电话:0791-88133135
公司传真:0791-88221576
手机号码:18607918385
公司邮箱:sale@danbahe.cn
公司地址:南昌市高新区创新三路811号
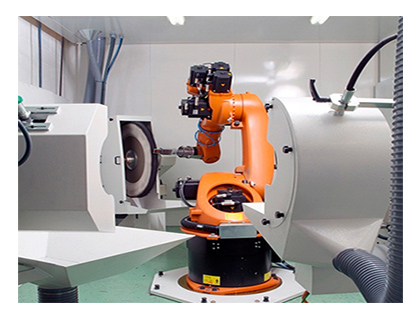
你真的了解工业机器人的组成结构和技术原理吗
DANBACH ROBOT
工业机器人在如今的社会生产中已经得到了相当大的普及,它靠着自身动力和控制能力来实现各种功能,它不仅可以接受人类指挥,还可按照预先编排的程序运行。
下面让我们同浅析工业机器人的组成结构和技术原理
工业机器人的组成结构:
1、工业机器人由主体、驱动系统和控制系统三个基本部分组成,主体即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构,大多数工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制;
2、工业机器人按臂部的运动形式分为四种,直角坐标型的臂部可沿三个直角坐标移动;圆柱坐标型的臂部可作升降、回转和伸缩动作;球坐标型的臂部能回转、俯仰和伸缩;关节型的臂部有多个转动关节;
3、工业机器人按执行机构运动的控制机能,又可分点位型和连续轨迹型;点位型只控制执行机构由点到另点的准确定位,适用于机床上下料、点焊和般搬运、装卸等作业;连续轨迹型可控制执行机构按给定轨迹运动,适用于连续焊接和涂装等作业;
4、工业机器人按程序输入方式区分有编程输入型和示教输入型两类,编程输入型是将计算机上已编好的作业程序文件,通过RS232串口或者以太网等通信方式传送到机器人控制柜。
工业机器人的技术原理
1、开放性模块化的控制系统体系结构:采用分布式CPU计算机结构,分为机器人控制器(RC),运动控制器(MC),光电隔离I/O控制板、传感器处理板和编程示教盒等。机器人控制器(RC)和编程示教盒通过串口/CAN总线进行通讯,机器人控制器(RC)的主计算机完成机器人的运动规划、插补和位置伺服以及主控逻辑、数字I/O、传感器处理等功能,而编程示教盒完成信息的显示和按键的输入;
2、模块化层次化的控制器软件系统:软件系统建立在基于开源的实时多任务操作系统Linux上,采用分层和模块化结构设计,以实现软件系统的开放性,整个控制器软件系统分为三个层次:硬件驱动层、核心层和应用层。三个层次分别面对不同的功能需求,对应不同层次的开发,系统中各个层次内部由若干个功能相对对立的模块组成,这些功能模块相互协作共同实现该层次所提供的功能;
3、机器人的故障诊断与安全维护技术:通过各种信息,对机器人故障进行诊断,并进行相应维护,是保证机器人安全性的关键技术;
4、网络化机器人控制器技术:当前机器人的应用工程由单台机器人工作站向机器人生产线发展,机器人控制器的联网技术变得越来越重要,控制器上具有串口、现场总线及以太网的联网功能,可用于机器人控制器之间和机器人控制器同上位机的通讯,便于对机器人生产线进行监控、诊断和管理。
上一篇:简述工业机器人应用及发展前景
下一篇:在智能工业机器人逐渐普及的时代,你会面临失业吗